【AI】軽量Edgeコンピューターに搭載可能なリアルタイム学習AIアルゴリズムDeepBinaryTreeが実現する世界
岩手大学 理工学部 金天海准教授
エイシングが独自AIを開発した背景
金と出澤らが早稲田大学在学時、ロボット制御にAIを応用していた頃、なかなか満足のいくAIは無かった。当時も今もだが、AIを考案する研究者の大多数は機械系の出身では無く、機械システムにぴったりのAIが欲しければ自分達で作るしかない。特にリアルタイム応答性、動的な追加学習、高精度の3つを同時に実現することが従来手法では難しかった。この3つの技術課題を同時に解決したのがDeepBinaryTree:DBTである。
DBTのメリット
・AIのハイパーパラメータ調整が不要。
・メンテナンス無しで動的な追加学習が可能。
・学習データが増大しても、学習の計算コストは常に一定。
・軽量なエッジデバイス(例:RaspberryPi)においてリアルタイム学習と高速応答が可能。
・上記特徴によって、開発が迷走することもなくなり、高速なPDCAサイクルを実現し、開発期間短縮、開発コスト削減が可能。
DLとDBTの比較
最近良く知られているDeep Learning:DLとDBTは逆の性質のAIである。DLは画像処理のような多変量データの扱いが得意だが、DBTは機械の軌道データなどの少変量データの扱いでDLを上回る性能を発揮する。また、DLは使う人や日によって学習結果が変わるため、根気よく付き合えばいつかは良い結果が得られる。DBTは使う人や日に左右されず、同じデータならば同じ手続で淡々と学習を行う。 人の脳との対比では、DLは頭頂葉的性質を持ち、画像処理・音声処理・言語処理などが得意である。一方、DBTは小脳的性質を持ち、機械制御・軌道予測・統計解析などが得意である(表1)。
表1。DLとDBT比較
DeepBinaryTree:DBTとは
DBTは木構造を用いた階層型学習器である。図 1 にその例として N 階層 2 次元 2 分割のDBTネットワークを示す。DBTの学習は木構造を動的に成長させ状態空間を分割し、ある状態における出力ベクトルの対応を学習させることで関数近似を行う。 教師データ密度に応じた n 分木を適応的に構成するため、教師データが密な場合においては精細な、疎な場合には汎化を伴った予測を行うことができる。
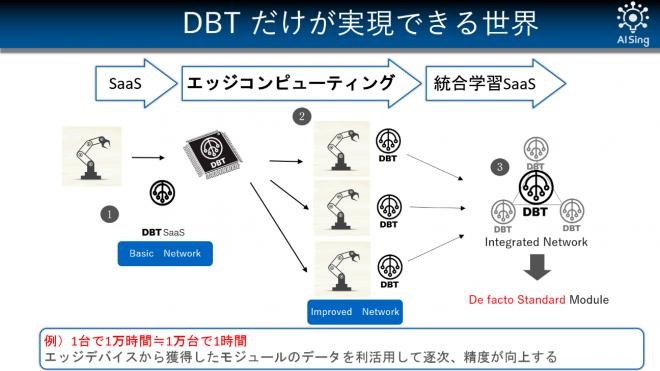
DBTは、AI専門家によるAIのパラメータ調整が不要で、動的な追加学習が可能で、IoTエッジデバイスにおいてリアルタイム学習が可能である。追加学習において、従来AIでは忘却問題を考慮し再学習が必要だがDBTはリアルタイムに継足し学習が可能なオンライン型学習器である。この特徴を活用し、クラウド側(Azure)・エッジ側(RaspberryPi等)の両方で学習と予測がリアルタイムに可能で、さらに下図の様にエッジデバイス側で学習獲得されたモジュールを統合学習させることが可能である。
DBTの応用事例①(自動補正)
<人型ロボットの関節角誤差軽減>
安価なロボットの登場により、ロボットが身近な物になってきている。しかし、それら安価なロボットはハードウェア面での限界が顕著に表れやすく、高精度な制御が難しいという欠点がある。そこで、人型ロボットの関節に存在するハードウェア面の以下の二つの問題点について取り上げ、 ソフトウェア側からそれを補うことで高精度な制御の実現を目指しています。
①角度センサの通信エラー
②目的の関節角度と実際の関節角度間の誤差
DBTを活用することで以下のことが実現した。
①センサ推定値による通信エラー時のセンサ値の補完
②誤差予測による誤差を考慮した制御
図はセンサ通信エラー時のセンサ値を推定値で補完した例である。 図中灰色の線が目的の関節角度、図中青点線が関節の角度センサから得られた値、図中赤点線がセンサ値の推定値。センサの通信エラーが発生した図中木枠で囲った部分で、 センサ値を補うように推定を行うことができています。
図は指令値センサ値管の誤差グラフである。赤線が誤差を考慮した制御を行った場合の誤差であり、 図中青線が特別な制御を行わなかった場合の誤差である。学習を行うことで誤差を減少させることができた。
DBTの応用事例②(予測制御)
一般的に、流された船舶をPID制御などで元の位置に戻そうとしても、 海上では波などの外乱があるために、うまく元の位置にたどり着けない問題がある。 そこで外乱を踏まえた制御を行う必要がある。船舶にかかる加速度は以下の式で与えられる。
a=a0+at+aw
aは船舶の加速度であり、これはフリーダイナミクス(水面抵抗、浮力、重力など)による加速度a0、動力による加速度at、 外乱による加速度awにより決まる。これら全ての加速度が測定・予測できれば、船体を自在に制御することができる。
船舶の加速度aは計測により求めることができる。本研究では海底画像処理とジャイロセンサを用いている。 動力(スラスタ)による加速度atはスラスタへ与えた指令値とその際のaの対応から求めることができる。しかし、フリーダイナミクスによる加速度a0は船体の形状や速度などにより異なる値をとるため、数式により求めることは困難である。 そこで、本システムでは力学系学習木により船体に加速度a0を学習・推定させる。これらと上式より、外乱による加速度awを求めることができる。awをキャンセルするだけの加速度をatに与えることにより、 外乱を打ち消す制御ができる。
実際に実験機を用いて加速度a0を学習・推定すると、以下のように、 実際のフリーダイナミクスによる加速度と一致する結果が得られる
社会実装や今後の展望など
エイシング社の展望
機械制御分野では、まだ世界で誰も成し得ていないスタンドアローン環境のIoTエッジデバイスにおけるリアルタイム学習が可能な DBTを組込んだチップ・ボードの販売を計画している。センサー、FA機器、自動車、工作機器などの複数の大手メーカーと共同開発を既に行っており、「ものづくり」×「AI」のコラボレーションによって新たなソリューションの研究開発を進めていく。
また統計解析分野では、多変量解析の技術と併用することで、様々な事象に潜む相関・法則を洗い出し、金融、不動産、流通、物流、医療、農業などのシステムモジュール化を進めることで、社会知プラットフォームのデファクトスタンダードを目指す。
岩手大学 理工学部 准教授
株式会社エイシング 創業者 最高技術責任者
金 天海
株式会社エイシング
創業者 代表取締役 最高経営責任者
出澤純一
お問い合わせ先
株式会社エイシング sales@aising.jp
【お問い合わせ】
さらに詳しい内容は、一般社団法人産学連携推進協会へお問い合わせください。